Bayesian Tracking of Video Graphs Using Joint Kalman Smoothing and Registration
Aditi Bal, Ramy Mounir, Sathyanarayanan Aakur, Sudeep Sarkar, Anuj Srivastava
Abstract
Graph-based representations are becoming increasingly popular for representing and analyzing video data, especially in object tracking and scene understanding applications. Accordingly, an essential tool in this approach is to generate statistical inferences for graphical time series associated with videos. This paper develops a Kalman-smoothing method for estimating graphs from noisy, cluttered, and incomplete data.
Approach
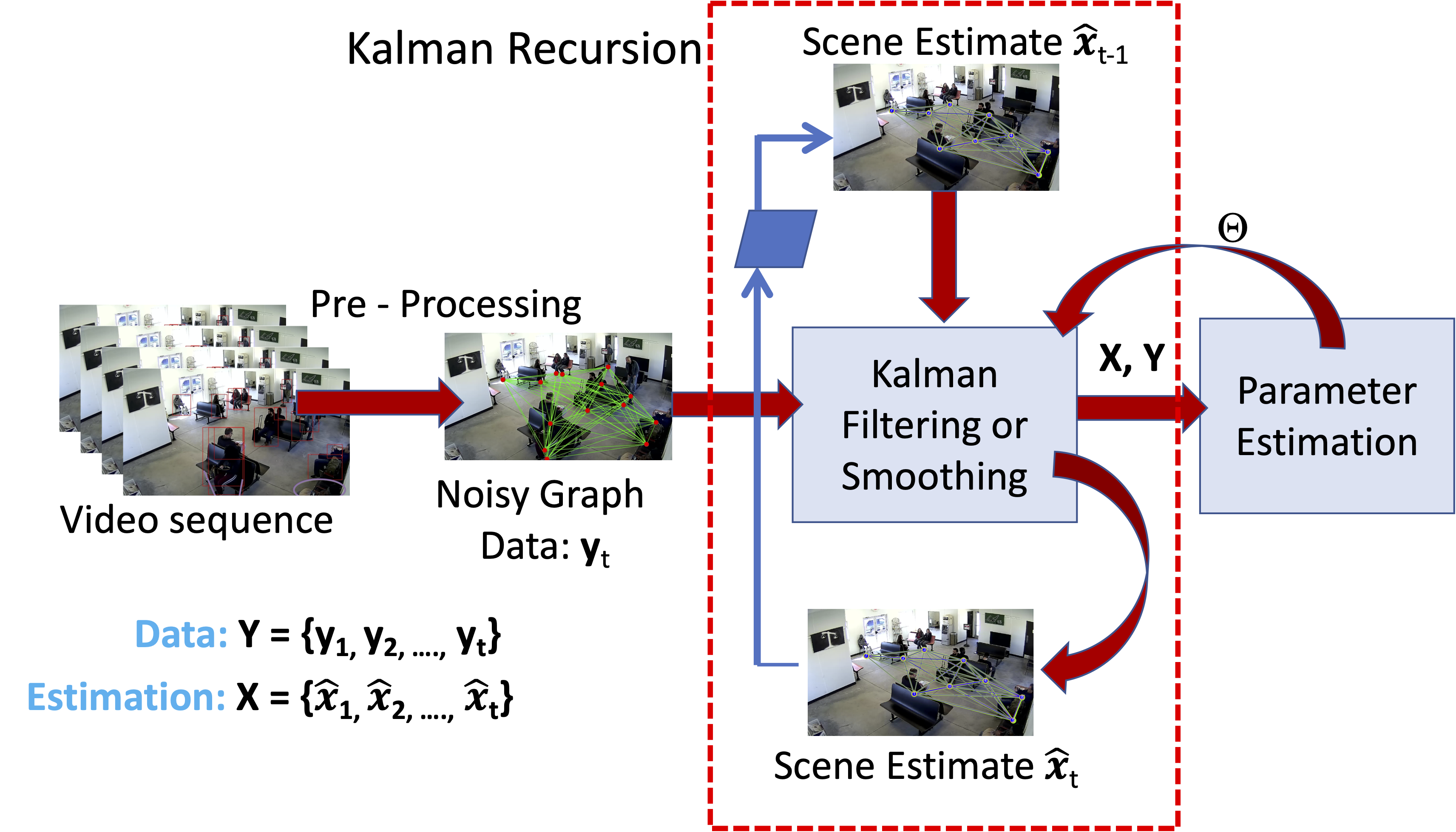
An overview of time-series analysis for estimating graphs in video frames.
Video Presentation
Further Information
If you like this project, please check out other related works from our group:
- Mounir et al. - STREAMER: Streaming Representation Learning and Event Segmentation in a Hierarchical Manner (NeurIPS 2023)
- Mounir et al. - Towards Automated Ethogramming: Cognitively-Inspired Event Segmentation for Wildlife Monitoring (IJCV 2023)
- Mounir et al. - Spatio-Temporal Event Segmentation for Wildlife Extended Video (CVIP 2021)
- Mounir et al. - Self-Supervised Temporal Event Segmentation Inspired by Cognitive Theories (Book Chapter)
- Xiaoyang et al. - Statistical shape analysis of brain arterial networks (ban)
Acknowledgements
This research was supported in part by the US National Science Foundation grants 1955154, IIS 2143150, IIS 1955230, CNS 1513126, and IIS 1956050.
Citation
@misc{BayesianTracking,
title = {Bayesian Tracking of Video Graphs Using Joint Kalman Smoothing and Registration},
author = {Aditi Bal and Ramy Mounir and Sathyanarayanan Aakur and Sudeep Sarkar and Anuj Srivastava},
booktitle = {European Conference on Computer Vision},
year = {2022},
note = {ECCV},
award = {Oral}
}